In the name of Allah, the Most Beneficent, the Most Merciful.
Assalamualaikum w.b.t
In this video, Jose will shows us about LC Filters also known as Sanders Filters. Jose has build up LC filter by himself which is made from ferrite core with shrink wrap tubing (on top) and a capacitor (at the bottom). The green wire is the magnet wire which is also wrapped by shrink tube that surround by the fair right core.

Another filter is the new version of filter
Here's a little pictorial on LC filtering. Use a piece of servo wire and strip off the signal wire so left with BLACK-RED. For constructing the inductor (the L in LC filtering), loop both wires through a ferrite ring as many times as it'll fit, but at least >5 times. Use both wires as that gives a little better attenuation of the ESC noise as the inductor now becomes a common mode inductor.
Then simply solder a 470...1000uF/25V electrolytic capacitor (the C in LC filtering) to the side that attaches to the audio/video transmitter and the camera. The capacitor is polarized, hence it has a + and - pole. The - pole is marked with a stripe and - symbols on one end, can't miss it, that needs to go on the BLACK wire, the + pole is on the RED wire. This will clear up any ESC noise that normally causes lines in the video. The parts we'll need are:
Then simply solder a 470...1000uF/25V electrolytic capacitor (the C in LC filtering) to the side that attaches to the audio/video transmitter and the camera. The capacitor is polarized, hence it has a + and - pole. The - pole is marked with a stripe and - symbols on one end, can't miss it, that needs to go on the BLACK wire, the + pole is on the RED wire. This will clear up any ESC noise that normally causes lines in the video. The parts we'll need are:
- Length of servowire
- Ferrite ring
- 470...1000uF 25 volt electrolytic capacitor
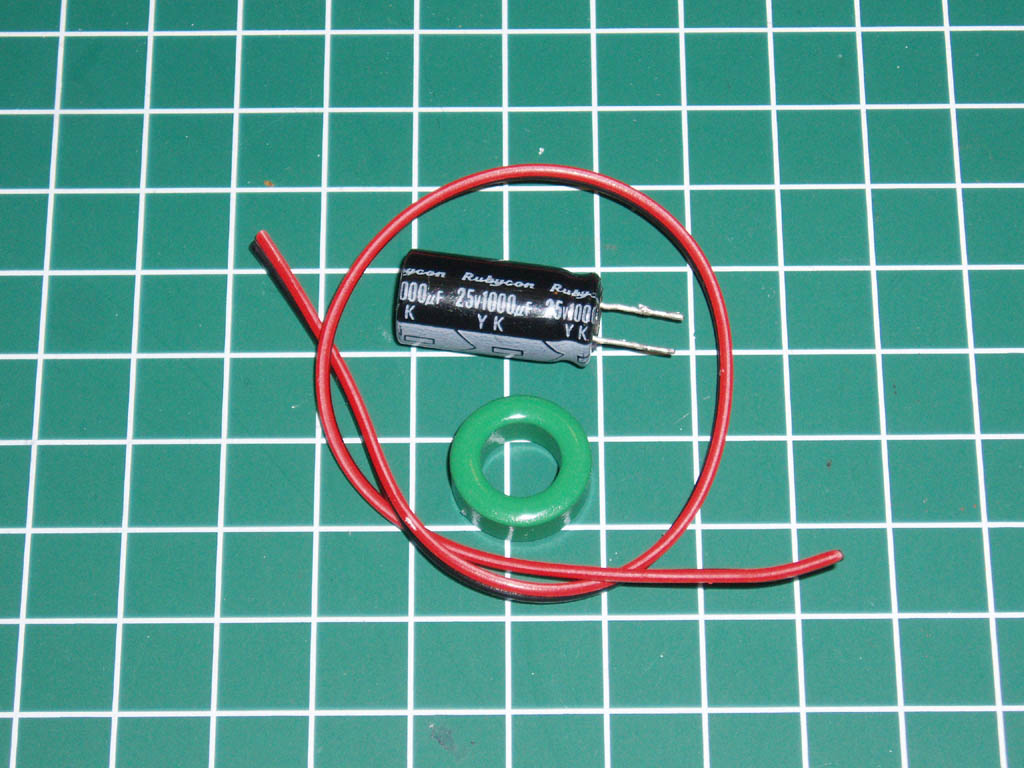
Fig 1. Here's the parts you'll need, available from Radio Shack and similar stores.
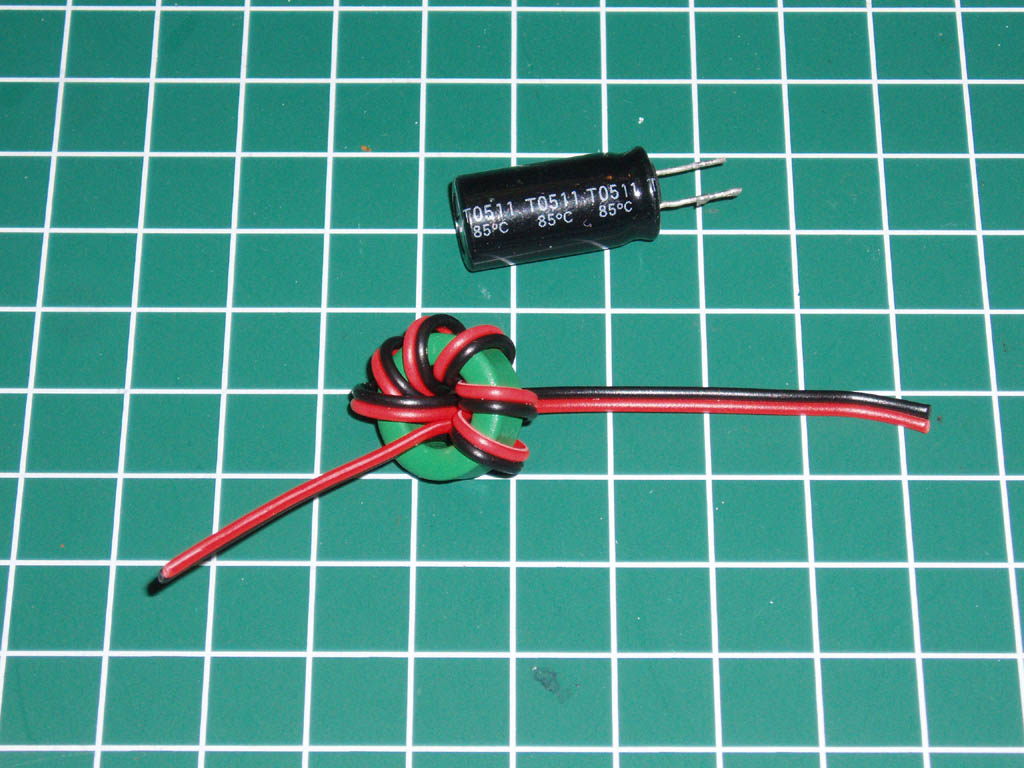
Fig 2. Here's the servo wire being looped through the ferrite ring.
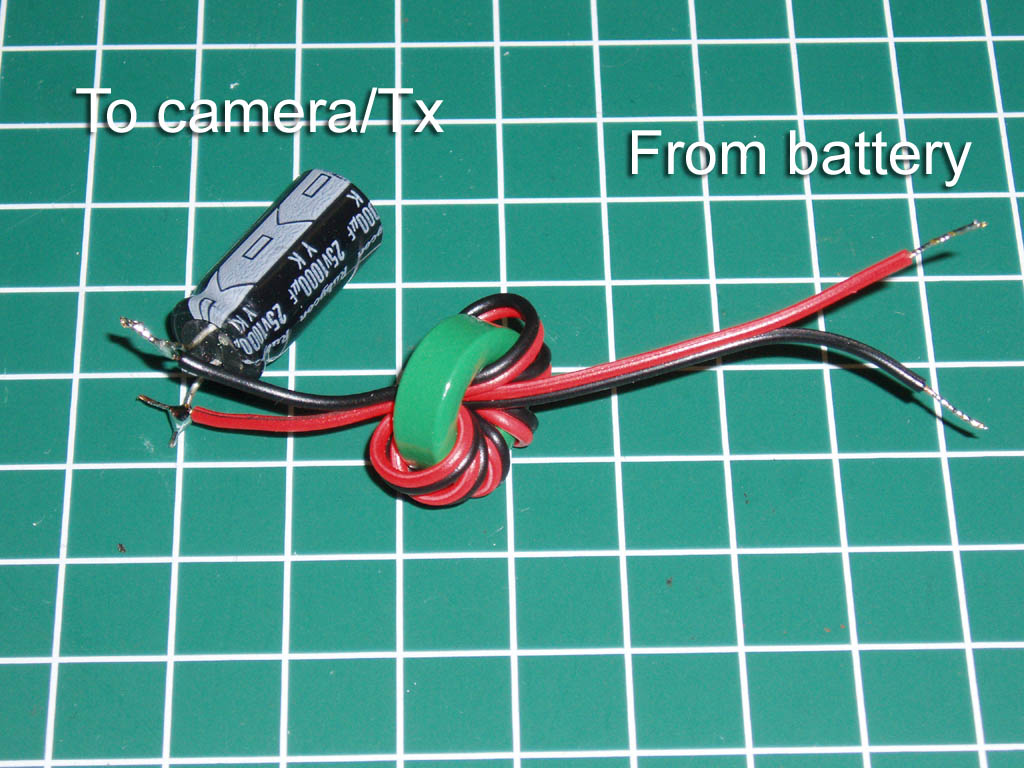
Fig 3. And that's the finished LC filter with the capacitor soldered on.
Next is Jose showed the wiring diagram ,

Wiring diagram of filter to the battery LIPO which is divided into an old design and new design.
Old Design
From the diagram, the ferrite core has been drawn with green lines because it is showed that the ferrite core has been wrapped around by magnet wire with 20 turns around the core and solder it on with another positively (red wire) of LIPO battery (+). Another negatively (black wire) get branches off from LIPO IN battery to the LIPO OUT (-). The other side negatively (black wire) goes to negatively of capacitor (470mF, 35V, CAP) and the positively of capacitor connected to the positively of the ferrite core which is goes to LIPO OUT (+). If we want redraw it back, the same capacitor will be vertical instead of horizontal at the drawing before. It is in parallel connection which is positively goes to LIPO (+) and vice versa and only positively goes through the ferrite core.


New Design
According to the old design, the capacitor has both positive and negative leg are at the both side. Go to the new design, Jose used a different capacitor which is the positive and negative leg on the same side.


In this design, Jose has bought ferrite ring which is 0.68 inches in diameter instead of using a ferrite core. Instead of wrapping the magnetic wire on the ferrite core, the ferrite ring can be wrapped by the 24G wires and the way on how to do it is as above (scroll up). The black wire is pass through inside the ferrite ring (to make it more compact). The capacitor is a bit smaller than previous design which is 470mF 25V and the positive leg goes to LIPO(+) and the negative leg goes to LIPO (-). In the design, we can see the LIPO IN and LIPO OUT where the voltage of LIPO OUT goes to devices. If we have FPV camera, the LIPO OUT will connect to the FPV camera. The complete LC filter will be wrapped with heat shrink tubing for more neat.

An example if FPV camera and transmitter will be connected with the LC filter
Till then~